Descripción
Conocer la posición o velocidad de un motor es muy importante en robótica, para lo cual existen diversas alternativas, siendo una de las más comunes el uso de encoders de tipo óptico. Los encoders en general son dispositivos que se encargan de convertir el movimiento angular o lineal en pulsos eléctricos que puedan ser interpretados por el controlador del sistema. Los encoders incrementales ópticos realizan la medición de movimiento con el uso de un haz de luz infrarrojo que se ve interrumpido por las ranuras de un disco acoplado al eje. La cantidad de ranuras por vuelta determinará la precisión del encoder.
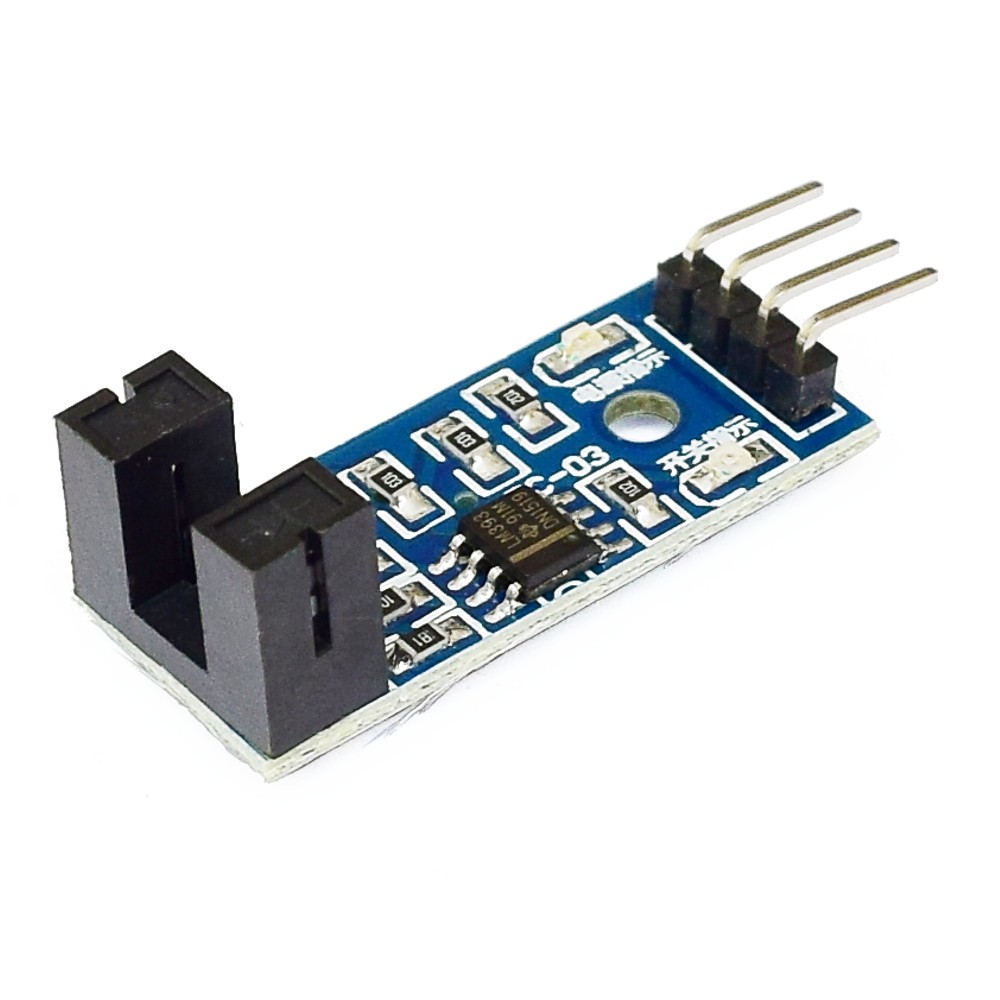
Este sensor para encoder óptico utiliza el opto interruptor infrarrojo MOCH22A. El Dispositivo MOCH22A cuenta con dos partes: Un emisor IR y un receptor o sensor IR. Entre el emisor y receptor IR existe un espacio para el objeto que bloqueará el paso de luz (disco ranurado). Los pulsos son digitalizados por un opamp LM393 en modo comparador entregando pulsos TTL que pueden ser interpretados por un microcontrolador como Arduino o Pic. Se recomienda utilizar interrupciones por flancos de subida/bajada para detectar los pulsos. En Arduino Uno los pines de interrupción por flanco son: 2 y 3. Se recomienda agregar un capacitor de 100nF entre la linea de salida D0 y tierra a modo de filtro pasa bajo y asi evitar falsos disparos en la interrupción. Otra recomendación es alimentar el módulo con 3.3V.
Este modelo de encoder ha sido diseñado para trabajar con plataformas de robótica móvil: seguidores de línea, sumos, laberinto. También son utilizados en contadores de RPM (Revoluciones por minuto) en motores DC/AC o como sensor de final de carrera.